Many years ago I saw a robot in TV. Well, it was only a hand on moving platform. One thing I remember from this show was that it took a glass of water from the table and move to another. That time, I was too young to build such a toy. What I did was much smaller and weaker. I didn't have skills and tools to build something better.
Now, after many years, when I got a bit plexiglass garbage, I started to think what I can do with that. Then I reminded about old dreams ;)
I started to work. First I made short pieces from which I planned to build fingers. I used two screws to put them together. This assured good grip. I have never considered use a glue. From my experience it was clear, that it will break in the less suitable moment. Two fingers on one of a sides I combined using M3 screw. Next thing I had to do was joints. In my drawer I found two brass gearboxes.

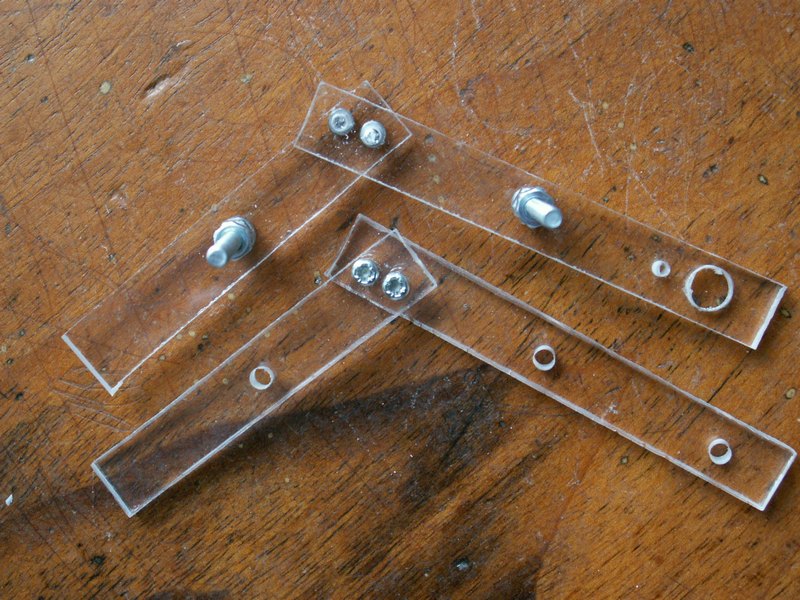

In one of them I made additional hole, which I used to stabilize it on gearbox wheel. I know it hard to make stable long arm using only one screw. That is why second point is a centric hole of a wheel. Unfortunately I couldn't repeat this same trick on thumb side, because fingers would stick on the ends and hand would not be able to catch small things. One solution that came to my mind was to use aluminium sleeve. With thumb finger it is combined using VERY tight fit and small dose of glue (just for sure). Unfortunately, this solution reduced maximum grip moment, so there was no sense to use stronger motor then from CD-ROM.




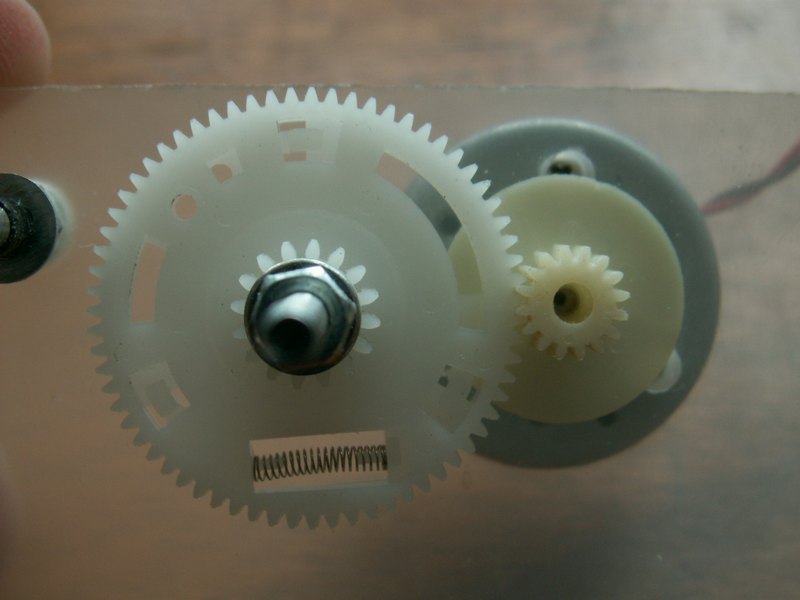
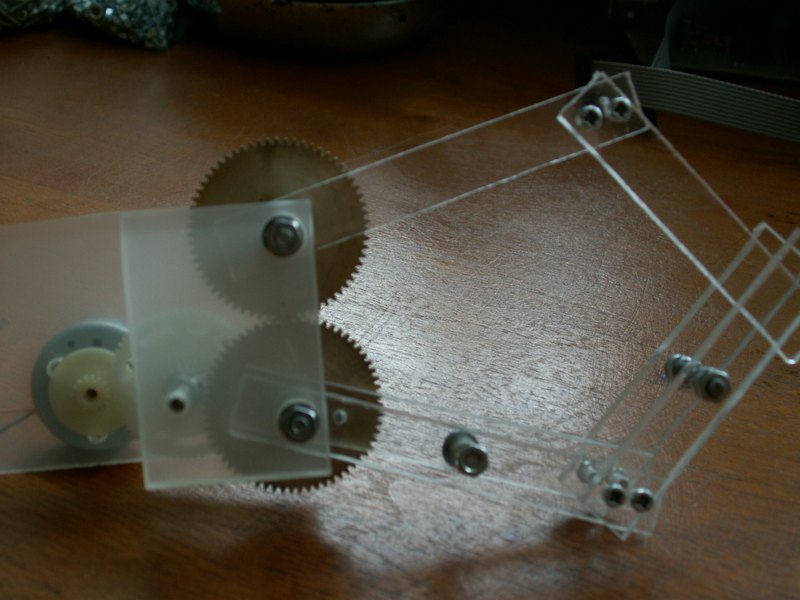
Brass gearbox wheels that I used had a small sleeve cut in a middle (see photo). I used that and made mirror one in aluminium sleeve. As you can probably figure out, if you make it without precision, you may get a big loose. And I got in first time. I had to made it once again :).
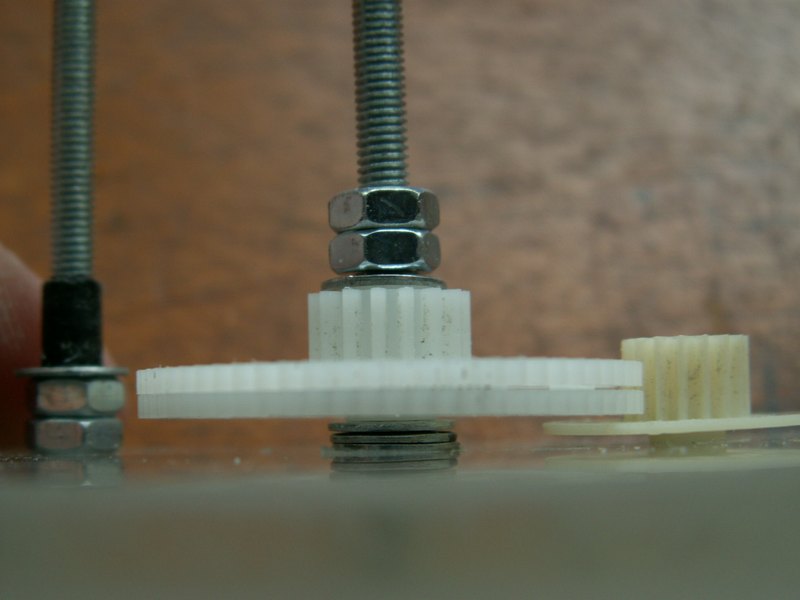
Brass wheels are mounted on two screws M3. Wrist is made from part of plexiglass and wheels are attached to it. The hardest thing was to measure where to drill holes for screws holding gearbox wheels. This also didn't work from first time ;-). Both M3 axis have additional plexiglass piece on the top to make it more rigid.




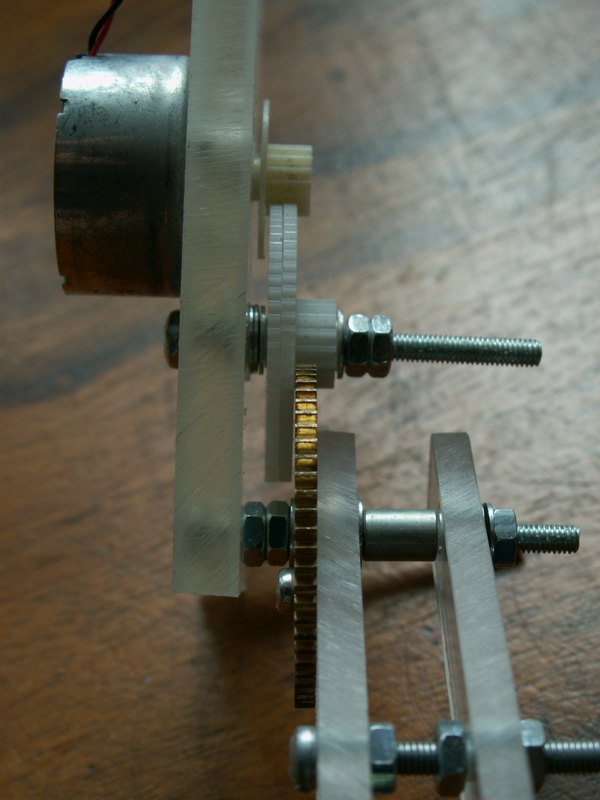
Another step was mounting a motor. In first version, it was directly attached to brass gears, but then I came to a conclusion, that this hand will not be stronger then one from the past. So I decided to add one more gears to increase the strenght. Of course,nothing for free. Bigger strenght meant slower speed. Motor is attached by three original screws. This time was hard too. Those screws are 2mm long, plexiglass is 6mm. I had to make holes deep enough to catch motor and not through. It was hard but I managed.
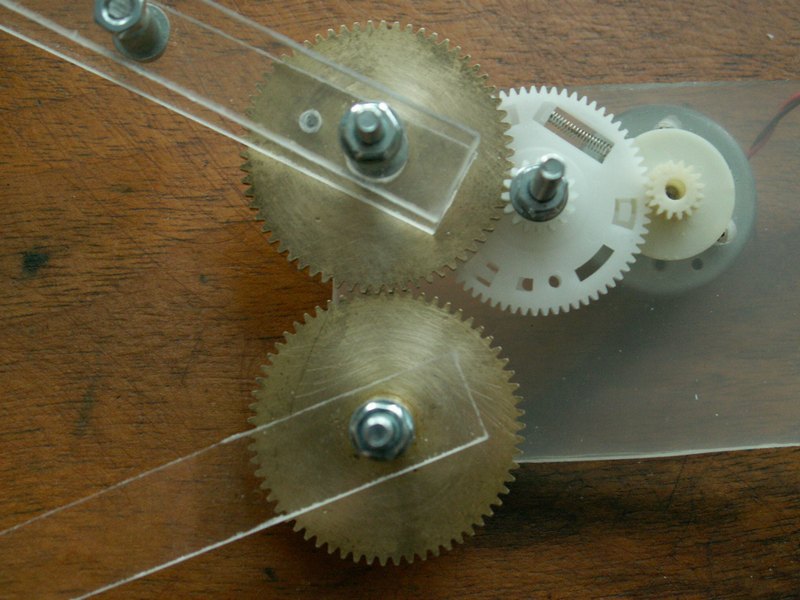
Remining photos: