Nazwa (ang. Slow – wolny, Walker – spacerowicz) pochodzi od szybkości jaką osiąga ten model :). Jest to mój pierwszy zdalnie sterowany model. Od małego „chorowałem” na zabawki zdalnie sterowane. Niestety, dorastałem w czasach PRL-u, kiedy takie zabawki były nie osiągalne dla zwykłych śmiertelników. Potem podrosłem i już nie wypadało się bawić autkami. Na szczęście będąc elektronikiem, można samemu sobie zrobić taki pojazd.
W tym modelu postawiłem na jak największą prostotę elektroniki. To spowodowało, że pojazd potrafi tylko jeździć (przód, tył, lewo, prawo, w miejscu w lewo i w miejscu w prawo). Nie dało się już dołożyć dodatkowych funkcji (np.: świecenie światłami itp.). Głównym założeniem było, by do jego budowy użyć modułów radiowych, które jakoś nijak nie chciały współpracować z mikrokontrolerami. Jak twierdził ich producent, praca rezonatora kwarcowego je zakłócała. Dlatego całość składa się z prostych układów logicznych. Najbardziej zaawansowanymi częściami układu są koder i dekoder użyte w nadajniku i odbiorniku. Nadają się one idealnie do zastosowania z tymi modułami.
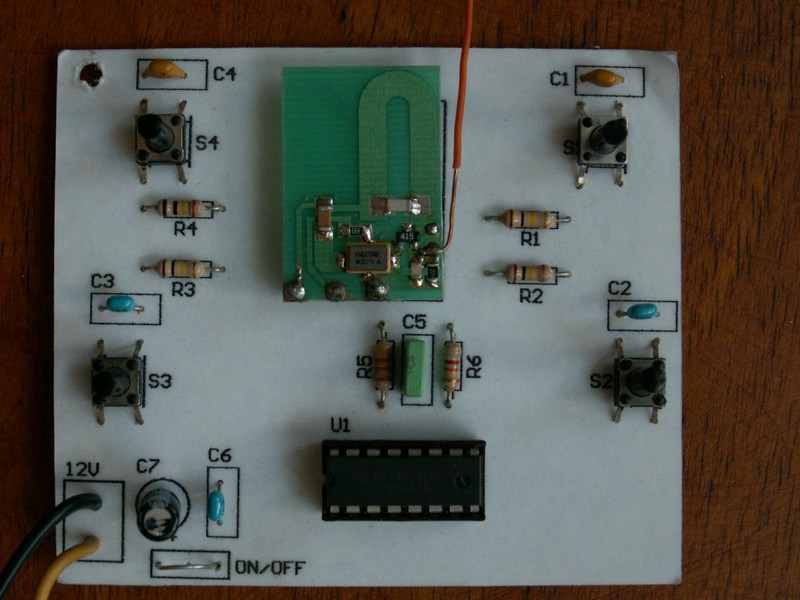
Nadajnik
Schemat nadajnika:
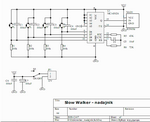
Składa się on z trzech części:
- klawiatury
- kodera
- modułu radiowego
Klawiatura to po prostu cztery przyciski typu microswitch:
- PL – przód lewy
- PP – przód prawy
- TL – tył lewy
- TP – tył prawy
Po naciśnięciu zwierają one odpowiadające im wyprowadzenie kodera do plusa co oznacza „1” logiczną. Kondensatory 100nF połączone równolegle z nimi służą do tłumienia niekorzystnego efektu drgania styków tych przełączników. Oporniki łączące jedno z wyprowadzeń przycisku z masą mają za zadanie zdefiniowanie staniu niskiego na wejściu kodera w momencie gdy przycisk nie jest naciśnięty.
Kombinacja tych czterech przycisków wraz z adresem (ustalanym przy pomocy wejść A1-A5) są cały czas wysyłane z częstotliwością wyznaczaną przez elementy R5, R6, C5 (elementy zewnętrzne wewnętrznego oscylatora). Dane są podawane (szeregowo) na wyjście Q.
Odbiornik
Schemat odbiornika
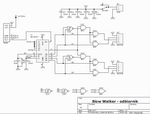
Składa się on z trzech części:
- modułu radiowego
- dekodera
- układu prostej logiki
Dane z wyjścia modułu radiowego są podawane wprost na wejście (Din) dekodera. Dekoder przesuwa przychodzące dane zgodnie z taktami wewnętrznego oscylatora w wewnętrznym rejestrze przesuwnym. Częstotliwość w odbiorniku musi być oczywiście taka sama jak w nadajniku. Po skompletowaniu pełnej informacji w rejestrze, zawartość jego pól adresowych jest porównywana z polami adresowymi odbiornika. Jeżeli są takie same, to wartość czterech bitów danych trafia na wyjścia D6-D9, a na wyjściu VT pojawia się logiczna „1”.
Układ bramek pilnuje by do układów sterujących silnikami nie przedostała się informacja „11”.
Oznaczało by to, że silnik ma się obracać w obu kierunkach jednocześnie. Oczywiście, silnik by się nie obrócił ale doprowadziło by to do uszkodzenia tranzystorów sterujących silnikami, które są połączone w układzie mostka typu H.
Bramki logiczne NAND pełnią rolę nadzorców nad liniami danych. W momencie gdy pojawi się zabroniona kombinacja 11 (lewy/prawy przód i tył jednocześnie), na wyjściu bramki pojawi się logiczne „0”, co zablokuje dalszy przepływ informacji. Jeżeli przychodząca kombinacja jest poprawna i na wyjściu VT pojawia się stan logicznej „1” to bramki U3A, U3B, U4B, U4C przepuszczają informacje z wyjść D6-D9 do sterowników silników. Jeżeli sygnał VT jest równy logicznemu „0” (np. niepoprawny adres) to bramki U3C i U4A podają na swoim wyjściu również logiczne „0” co powoduje blokadę informacji w bramkach wyjściowych i przekazanie do silników komendy równoznacznej z poleceniem STOP („00”).
Szereg kondensatorów na górze schematu to kondensatory odkłócające dla cyfrowych układów scalonych.
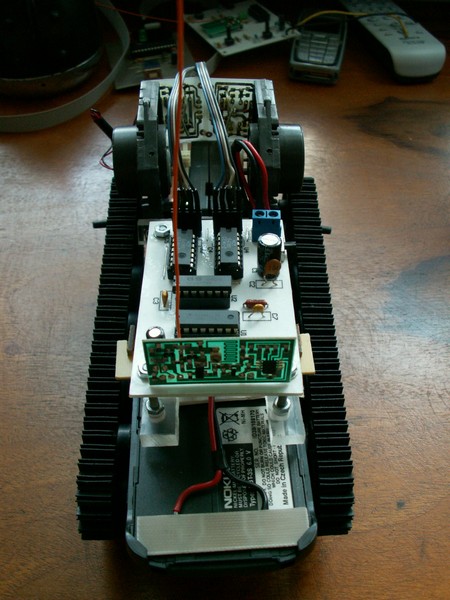
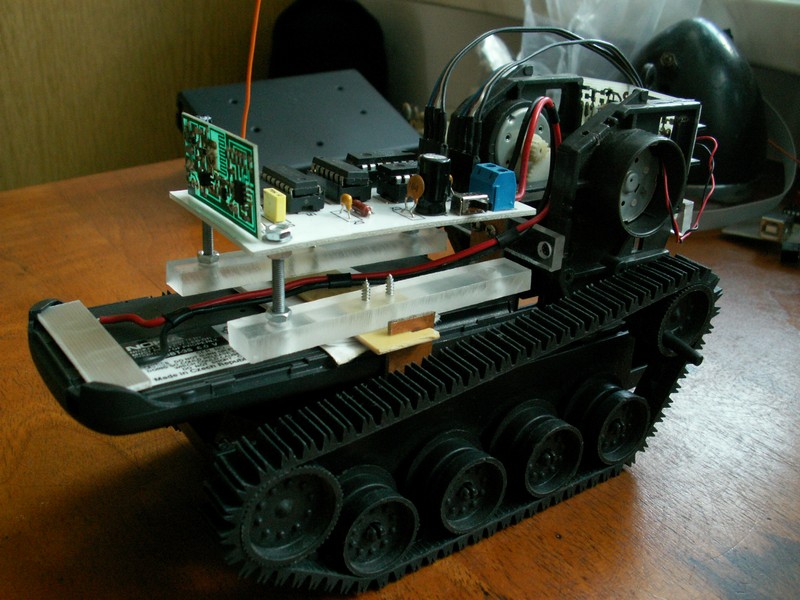
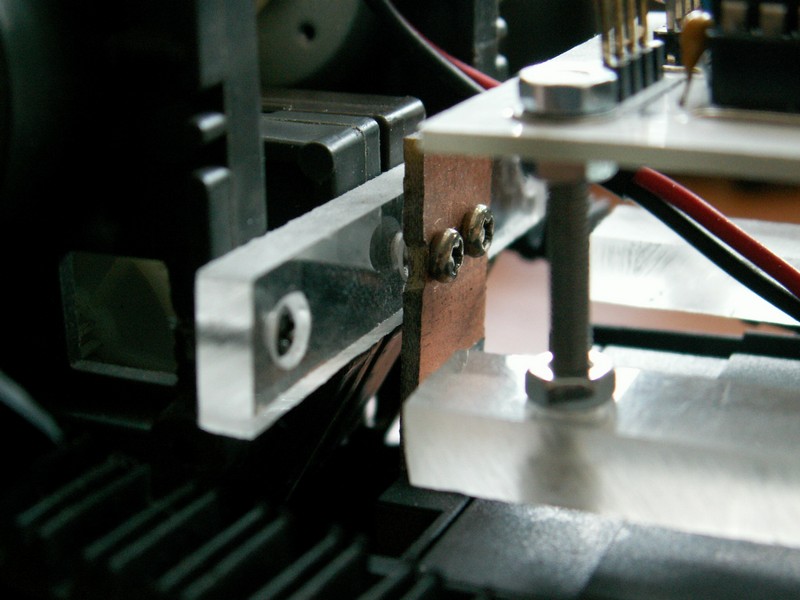
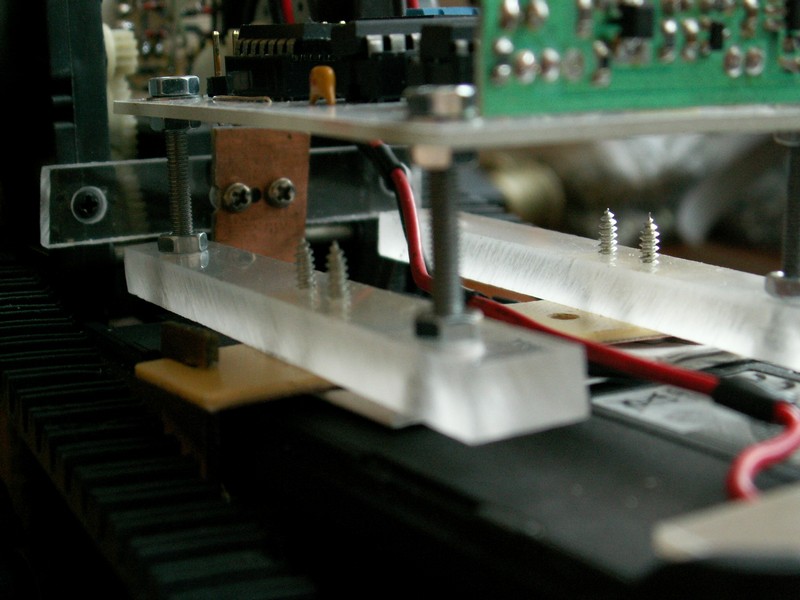
Konstrukcja modelu
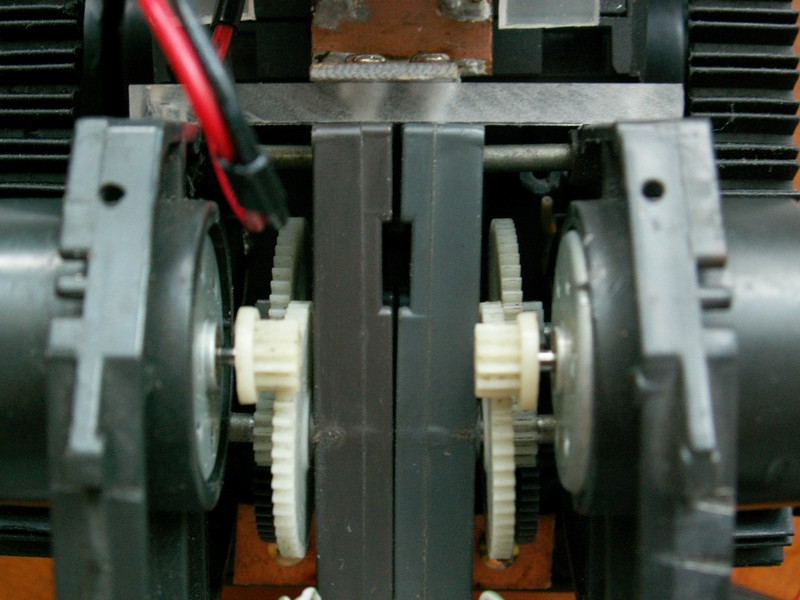
Jako podstawę użyłem model plastikowego czołgu (z Chin), który można znaleźć w różnych hipermarketach. Przy poszukiwaniach należy zwrócić uwagę, czy gąsienice są ruchome, ponieważ często zdarza się, że napęd właściwy jest inny. W fabrycznym urządzeniu napęd jest wspólny dla obu gąsienic. Niestety trzeba go usunąć, chyba że chcemy by model jeździł jedynie w przód i w tył ;-). Ja wolę jednak jak skręca (nawet w miejscu), więc zdemontowałem oryginał i umieściłem dwa napędy ze starej (jeszcze PRL-owskiej) zabawki "pojazdu księżycowego". Przekładnia z kilku kółek zębatych jest niesamowicie silna. Niestety oryginalne silnik dokonały już żywota. W ich miejsce zastosowałem dużo mniejsze silniczki z CD-ROM-u. Na szczęście są one wystarczające.
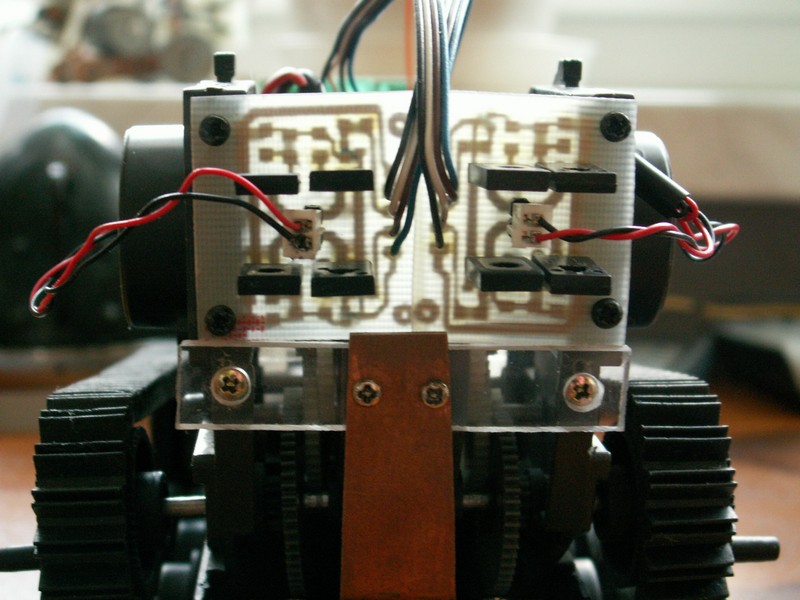
Wszystkie elementy konstrukcyjne są wykonane z pleksi. Szczegóły można zobaczyć na zdjęciach. Do zasilania odbiornika użyłem baterii z tzw. "cegłofonu" czyli bardzo starego i dużego telefonu komórkowego. Daje ona jeszcze napięcie 6,8V. To wystarczy. Myślę jednak, że z czasem przerzucę się na akumulatorki paluszkowe. Ich masa również zapewni odpowiedni rozkład środka ciężkości.